Bio Robotics

About
BioRobotics Lab is focused on developing dexterous prosthetic and robotic hands, and equipping them with sensory capability, including sense of touch, and visual guidance. The lab has developed a bimanual robotic system with dexterous hands has demonstrated how hands manipulate objects through palpation and improving slip and grasp capabilities. The Lab has also developed tactile sensors for the fingers of the dexterous hand and high density sensors for tactile palpation, edge and shape recognition. The neuromorphic group models the tactile receptors as well as models the retina-like vision sensors, and more recently a range of sensation including affective touch and pain. Our ongoing research is on enhancing the tactile sensors (bilayer, neuromorphic), develop algorithms for palpation in medical application, and modeling the tactile/sensory nervous system. The engineering goals are to enhance the capabilities of dexterous prosthesis and bimanual robotic arms.
Project Description
Neuromorphic Engineering
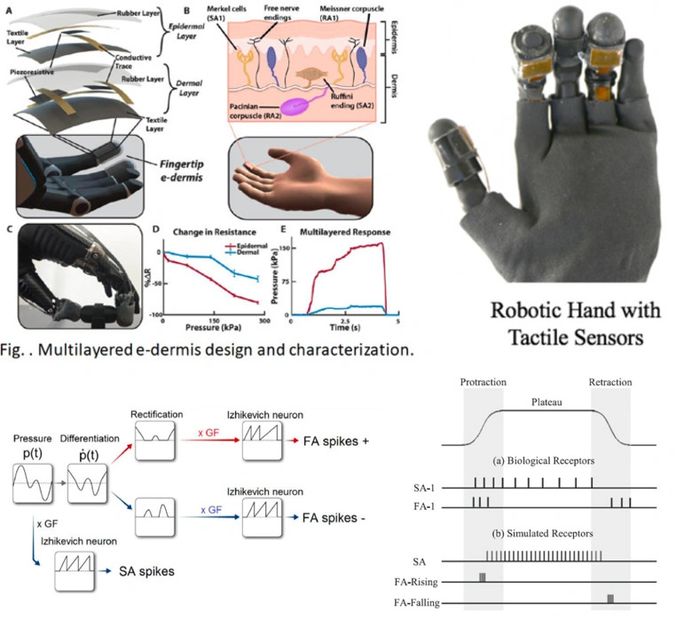
Neuromorphic Engineering aims to mimic neural receptors (sensors in skin, eye) and produce neural-like signals (spiking activity). The benefit of this biomimetic approach is to mimic the unique properties and benefits of biological receptors (dynamic range, specialization such as slow/fast response, selective response such as with motion, reduandant and fault-tolerant design, and most importantly power reduction). Our research focuses on the following areas: 1) Biomimetic touch sensor (mimicking multi-layer slow and fast receptors in E-dermis, 2) Biomimetic vision, mimicking retinal vision for specialize processing of objects, optical flow, target recognition for robotics.
Soft Robotic (Prosthetic) Hand with Soft Human Skin and Vision
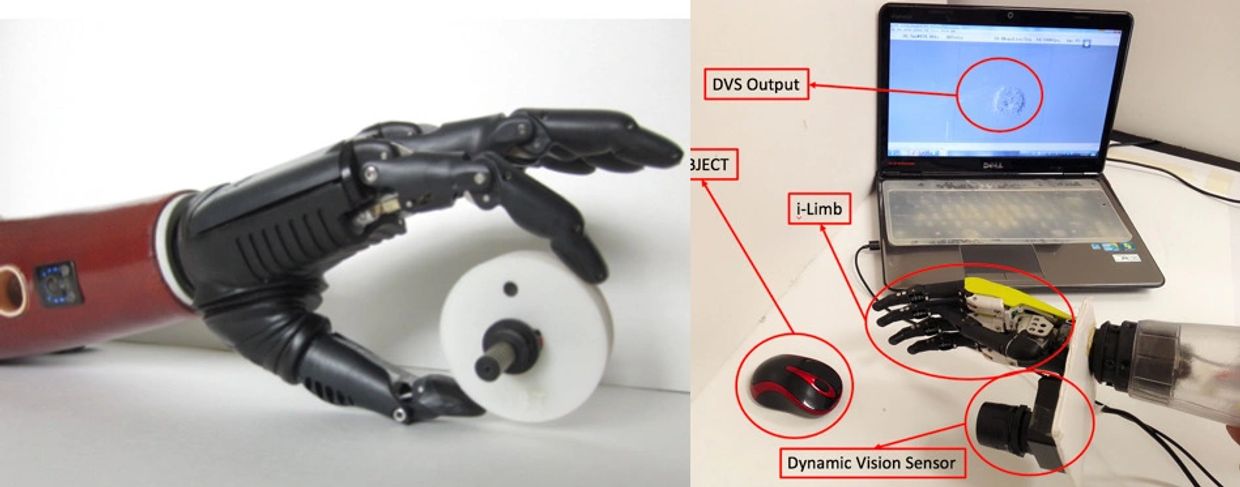
Our research focuses on the following areas: 1) To program and control multi-fingered hands (commercial prosthetic hands, designed soft fingers with pneumatic or electroactive actuation), 2) To design sensors that mimic human skin to provide a sense of touch, pressure, temperature and pain perception and 3) To attach a camera to the hand for manipulating with vision and touch. The project is suitable for students who like to do hands-on mechatronic or electronics work, gain experience with prosthetics/robotics, and program and demonstrate practical systems. Advanced students may do research on deformable skin and finger modeling as well as modeling the touch receptors in human skin and mimicking them fully for future prosthesis and robots.